An On-Board Stereo Visual-Inertial Odometry System
Freitag, 30. Juni 2017
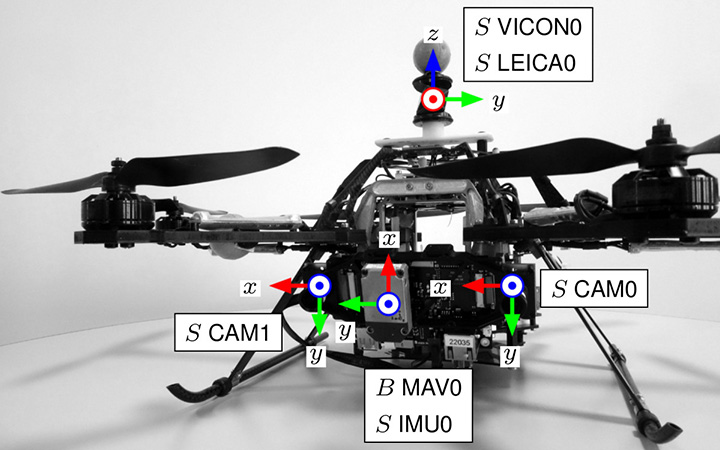
Im Projekt „An On-Board Stereo Visual-Inertial Odometry System for an Unmanned Aerial Vehicle“ ist ein Algorithmus zur Bewegungsschätzung eines UAV (Quatrocopter) während einer Masterarbeit entwickelt worden. Dieser verwendet die Daten einer Sensoreinheit, die eine Stereokamera und einen Inertialsensor (Gyroskop / Accelerometer) kombiniert. Die Bewegungsschätzung basiert auf einem stereo visuellen Odometrie-Algorithmus, der Keypoints matched um diese zu 3D Punkten zu rekonstruieren. Darauf aufbauend wird die Bewegung durch Ausnutzung der Kamerageometrie (Rückprojektionsfehler und Epipolarbedingung) berechnet. Die rein visuelle Bewegungsschätzung kann nun durch Integration von Gyroskopmessungen ergänzt werden, um die Bewegung schneller und präziser zu schätzen. Eine besondere Schwierigkeit hierbei ist, die Eigenschaften des Gyroskops korrekt zu modellieren und mit seiner hohen Datenrate (200Hz) umzugehen. Der Entwickelte Algorithmus wurde speziell auf einem Datensatz, der mit einem Unmanned Aerial Vehicle (UAV) aufgenommen wurde, evaluiert. Zusätzlich wird eine selbst gebaute Stereokamera mit integrierter IMU ausgestellt. Das Gehäuse des Systems wurde 3D gedruckt und die Ansteuerung der Hardwarekomponenten selbst programmiert.
Studenten:
- Stephan Manthe